Новини
Добавлено Jul 2, 2015
Спасение утопающих — дело рук роботов

Современная робототехника сегодня разделена, по большому счёту, на четыре основные категории:
- промышленные роботы, стационарные или перемещающиеся в пределах производственного помещения,
- бытовые роботы (пока представлены, в основном, пылесосами),
- военные роботы,
- и роботы для развлечений.
Конечно, деление это весьма условное. Но все остальные категории пока находятся в состоянии разной степени зачаточности. Использование роботов имеет огромный потенциал во многих сферах деятельности. Но активное внедрение механических помощников пока сдерживается рядом факторов, и в первую очередь научно-техническими затруднениями. При этом одной из наиболее перспективных областей для роботизации является спасение людей в зонах крупных техногенных аварий и природных катастроф. Эта тема с годами становится всё актуальнее.
Сама идея роботов-спасателей, как и роботов солдат, абсолютно не нова. И основным препятствием здесь становится не столько техническая, сколько алгоритмическая сложность. Даже людям очень непросто находить выживших, как же научить этому роботов? Конечно, полностью возложить на них эту задачу пока нельзя. Но всё же роботы уже могут быть задействованы для решения некоторых задач при поисково-спасательных операциях, причём они могут сделать это быстрее и эффективнее человека.
Сход лавины
В данной ситуации критическим фактором является время. Для спасения засыпанных снегом есть не более 15 минут, пока они не погибнут от асфиксии. За это время нужно найти выживших на огромной площади, покрытой нестабильным слоем снегом, что представляет опасность для самих спасателей. Сейчас альпинисты уже берут с собой индивидуальные маяки, применяется и поиск по сигналам мобильных телефонов. Но всё же это не позволяет достаточно быстро осуществлять поиск.
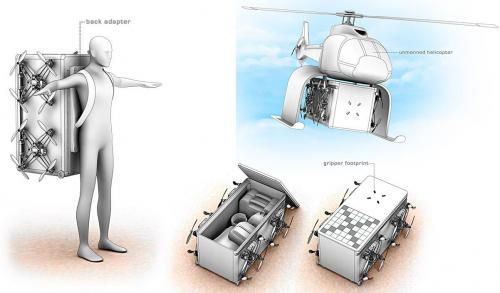
Одной из попыток решения данной проблемы стало создание проекта Sherpa, в рамках которого создаётся «роботизированная платформа» для горных поисково-спасательных работ. Это система, состоящая из трёх видов радиоуправляемых роботов:
- Высотный вертолёт либо самолёт, предназначенный для общего контроля и управления на территории поиска. Оснащён лидаром для быстрого картографирования района и радиоретранслятором для обеспечения устойчивой связи.
- Маленький дрон-мультикоптер, предназначенный для быстрого и подробного исследования отдельных участков, в том числе труднодоступных, например, провалов и трещин. Оснащён лазерным сканером для быстрого картографирования.
- Наземный ровер, оснащённый многофункциональным манипулятором-рукой. Он достаточно компактен, чтобы его мог переносить на спине человек. Оснащён радиоретранслятором и выступает в качестве зарядной станции для дронов.
Также для переноски припасов, оборудования и дронов используется специальный контейнер, который также работает в качестве зарядного устройства. Платформа Sherpa получается достаточно универсальной, её можно использовать далеко не только при поисках после схода лавин.
Наводнение
В данном случае задача роботов заключается в поиске выживших на очень большой территории и снабжение их припасами, необходимыми для выживания, пока не подоспеют спасатели. Вариант решения предлагается проектом Университета Карнеги Меллона Cooperative Robotic Watercraft. Он предполагает использование небольших групп маленьких роботов-глиссеров, которые совместно исследуют заданные квадраты, сообщают о найденных и доставляют небольшие грузы.
Разработчики создали несколько вариантов конструкции относительно дешёвых пластиковых роботов, оснащённых воздушными толкающими винтами. Для связи они используют обычные сотовые телефоны на Android, ориентирование осуществляется с помощью GPS. Также роботы оснащены камерой, Arduino и датчиками, включая систему для взятия проб воды.
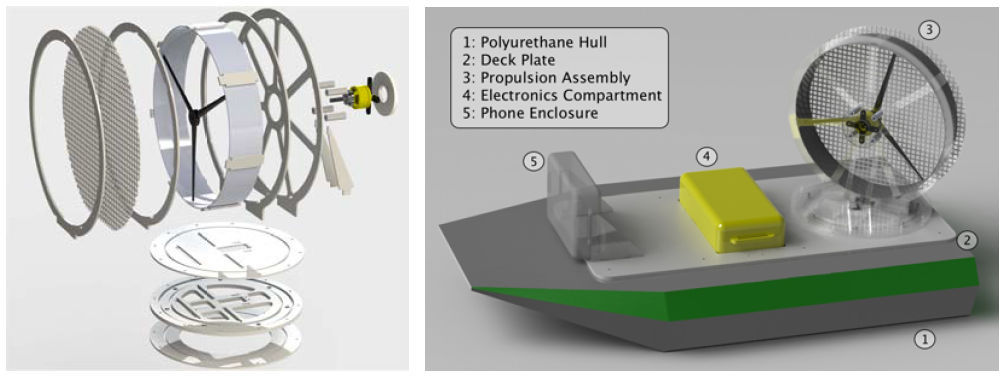
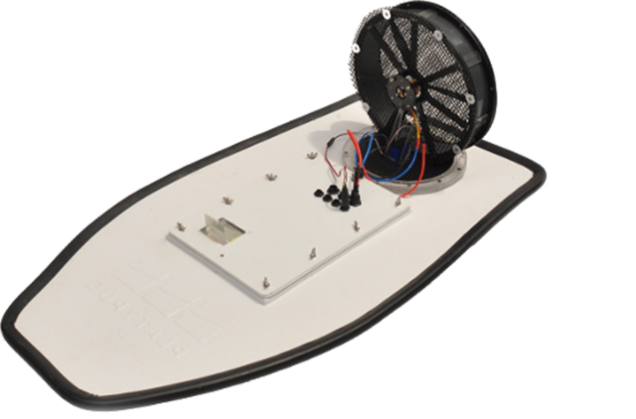
Минимальная длина лодки — 0,6 м, но конструкция позволяет масштабирование вплоть до довольно крупных конструкций длиной в несколько метров, оснащённых серьёзным оборудованием, вплоть до эхолокаторов и масс-спектрометров. По оценкам разработчиков, для полноценного поиска на одного робота должно приходиться не более 16 000 кв. м водной поверхности (1,6 га). Естественно, увеличение количества роботов на единицу площади ускоряет поиск и повышает эффективность.
Землетрясение
Разрушение здания ещё не означает, что в развалинах некого спасать. Однако здесь фактор времени очень важен. Для составления карты завалов и обнаружения возможных мест проникновения внутрь, разработчики Университета Райерсона оснастили мультикоптер камерой RGB-D, способную не только регистрировать изображение, но и определять расстояние до объектов. Подобное решение, в частности, использовано в Microsoft Kinect. Система анализирует изображения с двух камер (цветной и глубинной) для обнаружения трещин, провалов, проёмов и отверстий, через которые можно вести поиск выживших. При этом учитывается размер отверстий, глубина и окружающие условия.
Аварии, сопровождающиеся токсичными и радиоактивными выбросами
Наверное, это наиболее развитое направление в спасательной робототехнике: на рынке представлено довольно много моделей роботов, предназначенных для исследования завалов и мест, опасных для здоровья и жизни человека. В основном они представляют собой вот такие небольшие машины, которые могут использоваться как для поиска выживших под завалами, так и для контроля радиационной и химической обстановки в районе аварии.
А этот более мощный робот Parosha Cheetah может использоваться для самых разных задач, от наблюдения и ремонта до подвоза лекарств, припасов и эвакуации людей, благо грузоподъёмность достигает 110 кг.



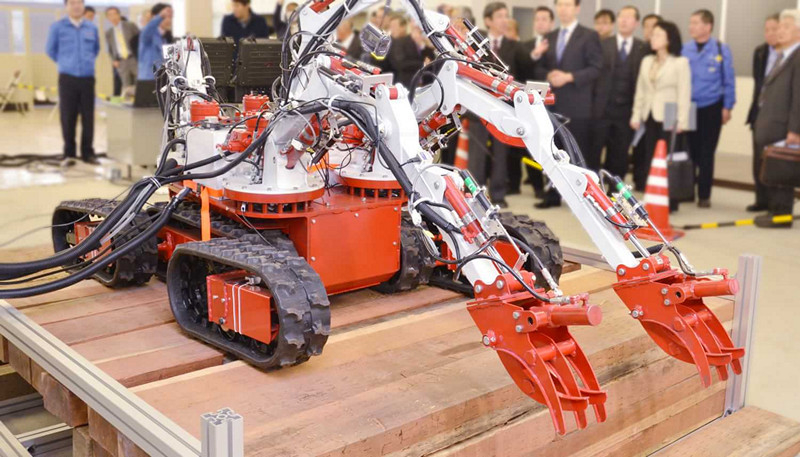
Из «свежих» разработок можно назвать 670-килограммового робота Octopus, оснащённого восемью манипуляторами (с грузоподъёмностью по 180 кг) и использовавшегося на японской АЭС Фукусима. Помимо прочего, робот может оснащаться лазером для резки камня и бетона, а также специальным захватом для работы с радиоактивными веществами. В целом Octopus является многоцелевым роботом, подходящим также для спасения выживших после землетрясений, цунами и пожаров.
Ещё одной проблемой, препятствующей широкому распространению роботов в спасательных операциях, является низкая надёжность моделей, изготовленных для «гражданского» применения. В то же время высоконадёжные военные или специализированные спасательные роботы стоят весьма недёшево. И мало какая организация решается вложить несколько десятков тысяч долларов в устройство, которое устареет или разрушится через считанные годы.
Так что либо развитие спасательной робототехники пойдёт по пути максимального удешевления, чтобы брать количеством, а не качеством, либо нам ещё долго ждать роботизации МЧС.